Description du projet
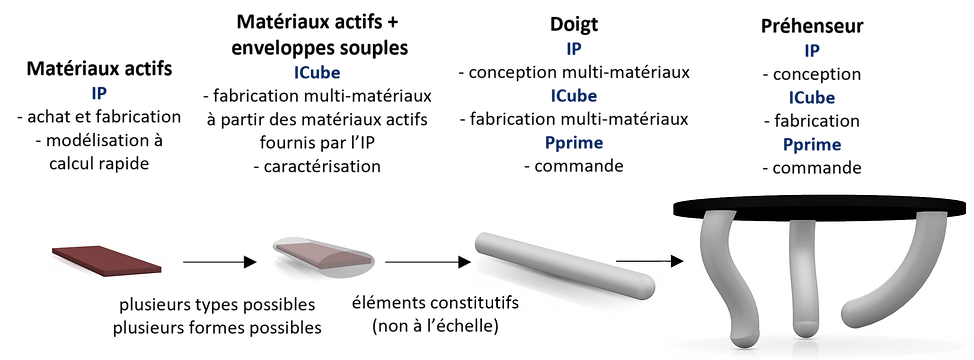
Conception multi-matériaux
Ce lot de travail impacte les domaines de la conception robotique, de la modélisation des matériaux intelligents, et de l’Intelligence Artificielle. L’enjeu scientifique est de définir une démarche de modélisation pour obtenir des modèles à calcul rapide du comportement des matériaux intelligents. De tels modèles seront nécessaires et mis en valeur lors de la conception optimale du doigt et du préhenseur nécessitant de mettre en place une méthode d’optimisation appropriée, et lors de la définition de la commande.
Évaluation expérimentale
Le banc expérimental sera développé en prenant appui sur les équipements des plateformes technologiques mécaniques des partenaires. Il comprendra les éléments de support du préhenseur, les objets à manipuler, et les instruments nécessaires à la métrologie des expérimentations (cameras, capteurs d’effort, de vibrations). Toutes les équipes participent activement à l’Equipex ROBOTEX, réseau national d’équipement d’ex-cellence en robotique. Chacune dispose de plateformes d’intégration exploitées dans le projet : cobo-tique industrielle à l’IP, cellule de robotique collaborative et centre de fabrication additive multi-ma-tériaux à ICube, main dextre dotée de 16 actionneurs à Pprime.
Fabrication multi-matériaux
Ce lot de travail impacte les domaines de la fabrication multi-matériaux pour la robotique. L’enjeu scientifique est ici d'obtenir, à partir d'un choix adapté de procédé, un dispositif fabriqué disposant des propriétés les plus proches de celles énoncées au cahier des charges. Le caractère multi-matériaux actifs et souples du dispositif oblige à définir un procédé innovant prenant appui sur des caractérisations expérimentales d’échantillons composites représentatifs. Les technologies de fabrication envisagées sont la fabrication additive multi-matériaux et les procédés de prototypage de polymères comme la coulée sous vide.
Commande modulaire
Ce lot de travail doit avoir des aboutissants dans le domaine de la commande de robots souples pour la préhension. L’enjeu scientifique est de développer un programme d’interface entre les modèles de matériaux intelligents et l’architecture modulaire de la plateforme de commande du préhenseur. Cette plateforme sera basée sur les travaux antérieurs de Pprime pour les préhenseurs poly-articulés. La commande devra permettre une manipulation dextre en utilisant des matériaux actifs et souples.